Back to table of contents | Next section
3.1 Introduction
The 3DMEMS devices discussed in the last chapter are actuated in parallel by several single-DOF translational inputs. Relatively high forces on the order of 10 mN are required to deflect the compliant joints during positioning. Due to its low voltage requirements and high force output, electrothermal transduction was chosen as the actuation method for 3DMEMS devices. Modeling, design, and performance results of fabricated thermal actuators are discussed in this chapter.
Both in-plane and out-of-plane actuators that rely on thermal expansion due to Joule heating have been developed by other groups [36,37]. Work has also been reported on the development of accurate models to predict actuator behavior [38,39]. Thermal actuators frequently employ geometric constraints to increase deflection; one example is the V-beam configuration illustrated in Figure 16. This actuator deflects laterally from thermal expansion of a clamped-clamped beam undergoing uniform heat generation. The beam is offset in the middle to control the direction of deflection.
Figure 16. V-beam electrothermal actuator as fabricated and in operation.
In Figure 17, micrographs and deflection measurements of fabricated V-beam and U-beam actuators are shown. The U-beam actuator is an example of a bimorph-type thermal actuator, in which unequal heating of the two arms causes translation and rotation of the actuator tip. U-beam actuators have been investigated as a part of the 3DMEMS program; however, the translational and rotational coupling makes it difficult to connect these actuators in parallel to produce a high-force array [40]. Although solutions such as pin-slot and rotary-joint yokes have been demonstrated by other groups, these solutions require a multi-layer process and typically result in unused deflection [41].
Figure 17. Micrographs and deflection measurements of fabricated V-beams (top) and U-beam (bottom).
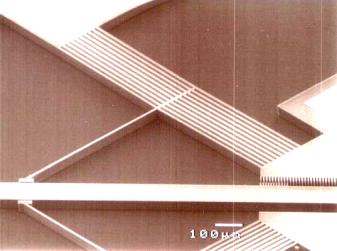
A micrograph of a fabricated V-beam actuator array is shown in Figure 18. The V-beam actuator has a strong advantage in its locus of motion [39]. Because they produce only translational motion, V-beam actuators are suitable for arrays in which a yoke passes through the actuator midpoints. Multiple V-beam actuators that share anchors are effectively wired in parallel to provide increased force without loss of deflection.
Figure 18. Micrograph of fabricated V-beam actuator array connected by midpoint yoke.
Past research efforts by other groups have focused primarily on polysilicon as a structural material for thermal actuators. As discussed in Chapter 1, surface micromachining processes allow complex designs to be fabricated by employing several layers. However, the maximum actuator height in these processes is limited, thus constraining actuator forces. Additionally, stiction problems can result after release because the devices are relatively compliant perpendicular to the wafer plane. Stiction and out-of-plane bowing have been shown to be problems with long polysilicon actuators, limiting their maximum useful length [38,41].
The SCS electrothermal actuators described in this chapter are fabricated by performing DRIE on an SOI wafer. This approach offers several advantages. First, DRIE of SCS allows robust, high-aspect-ratio devices to be constructed. These devices generate relatively large forces, as lateral force scales linearly with height. Second, the larger height results in larger device stiffness perpendicular to the wafer plane, reducing the possibility of stiction and out-of-plane bowing. Third, actuators can be integrated with 3DMEMS devices easily when fabricated in the 3DMEMS sld layer.
A new model for predicting the behavior of V-beam actuators has been developed. The complete theoretical analysis includes electrothermal, thermomechanical, and transient components. Temperature-dependent properties of SCS were found to act collectively at high temperatures to increase actuator performance. Deflection, force, and transient measurements have been performed, with experimental results in good agreement with predicted values. An upper limit of operation at 800 K has been estimated, corresponding to the intrinsic point of impurity doping in SCS.
V-beam geometry optimization has also been investigated. Deflection and force requirements of different applications can be met by varying actuator length, width, and offset. Approximate equations to calculate deflection and force have been developed to simplify the design process.